State Feedback
| Prev: Linear Systems | Chapter 6 - State Feedback | Next: Output Feedback |
This chapter describes how feedback can be used to shape the local behavior of a system. The concept of reachability is introduced and used to investigate how to "design" the dynamics of a system through placement of its eigenvalues. In particular, it will be shown that under certain conditions it is possible to assign the system eigenvalues to arbitrary values by appropriate feedback of the system state.
Textbook Contents
|
Lecture MaterialsSupplemental Information
|
Chapter Summary
This chapter describes how state feedback can be used to design the (closed loop) dynamics of the system:
-
A linear system with dynamics

is said to be reachable if we can find an input
 defined on the interval
defined on the interval  that can steer the system from a given final point
that can steer the system from a given final point  to a desired final point
to a desired final point  .
.
The reachability matrix for a linear system is given by

A linear system is reachable if and only if the reachability matrix
 is invertible (assuming a single intput/single output system). Systems that are not reachable have states that are constrained to have a fixed relationship with each other.
is invertible (assuming a single intput/single output system). Systems that are not reachable have states that are constrained to have a fixed relationship with each other.
A linear system of the form
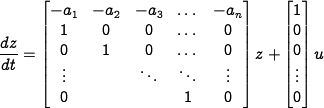
is said to be in reachable canonical form. A system in this form is always reachable and has a characteristic polynomial given by

A reachable linear system can be transformed into reachable canonical form through the use of a coordinate transformation
 .
.
A state feedback law has the form

where
 is the reference value for the output. The closed loop dynamics for the system are given by
is the reference value for the output. The closed loop dynamics for the system are given by

The stability of the system is determined by the stability of the matrix
 . The equilibrium point and steady state output (assuming the systems is stable) are given by
. The equilibrium point and steady state output (assuming the systems is stable) are given by

Choosing
 as
as

 .
.If a system is reachable, then there exists a feedback law of the form
the gives a closed loop system with an arbitrary characteristic polynomial. Hence the eigenvalues of a reachable linear system can be placed arbitrarily through the use of an appropriate feedback control law.
Integral feedback can be used to provide zero steady state error instead of careful calibration of the gain
 . An integral feedback controller has the form
. An integral feedback controller has the form

where

is the integral error. The gains
 ,
,  and can be found by designing a stabilizing state feedback for the system dynamics augmented by the integrator dynamics.
and can be found by designing a stabilizing state feedback for the system dynamics augmented by the integrator dynamics.
A linear quadratic regulator minimizes the cost function

The solution to the LQR problem is given by a linear control law of the form

where
 is a positive definite, symmetric
matrix that satisfies the equation
is a positive definite, symmetric
matrix that satisfies the equation

This equation is called the algebraic Riccati equation and can be solved numerically.
Additional ExercisesThe following exercises cover some of the topics introduced in this chapter. Exercises marked with a * appear in the printed text.
Frequently Asked Questions
Errata
|
MATLAB codeThe following MATLAB scripts are available for producing figures that appear in this chapter.
See the software page for more information on how to run these scripts. Additional InformationMore information on optimal control and the linear quadratic regulator can be found in the Optimization-Based Control supplement: |