Output Feedback
| Prev: State Feedback | Chapter 7 - Output Feedback | Next: Transfer Functions |
In the last chapter we considered the use of state feedback to modify the dynamics of a system through feedback. In many applications, it is not practical to measure all of the states directly and we can measure only a small number of outputs (corresponding to the sensors that are available). In this chapter we show how to use output feedback to modify the dynamics of the system, through the use of state estimators (also called "observers"). We introduce the concept of observability and show that if a system is observable, itis possible to recover the state from measurements of the inputs and outputs to the system.
Textbook ContentsOutput Feedback (pdf, 28Sep12)
|
Lecture MaterialsSupplemental Information
|
Chapter Summary
This chapter describes how to estimate the state of a system through measurements of its inputs and outputs:
-
A linear system with dynamics

is said to be observable if we can determine the state of the system through measurements of the input
 and the output
and the output  over a time interval
over a time interval  .
.
The observability matrix for a linear system is given by
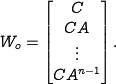
A linear system is observable if and only if the observability matrix
 is full rank. Systems that are not reachable have "hidden" states that cannot be determined by looking at the inputs and outputs.
is full rank. Systems that are not reachable have "hidden" states that cannot be determined by looking at the inputs and outputs.
A linear system of the form
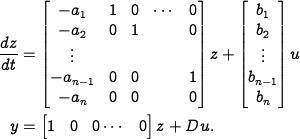
is said to be in observable canonical form. A system in this form is always observable and has a characteristic polynomial given by

An observable linear system can be transformed into observable canonical form through the use of a coordinate transformation
 .
.
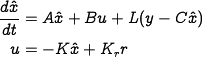
An observer is a dynamical system that estimates the state of another system through measurement of inputs and outputs. For a linear system, the observer given by

generates an estimate of the state that converges to the actual state if
 is has eigenvalues with negative real part.
If a system is observable, then there exists a an observer gain
is has eigenvalues with negative real part.
If a system is observable, then there exists a an observer gain  such that the observer error is governed by a linear differential equation with an arbitrary characteristic polynomial. Hence the eigenvalues of the error dynamics for an observable linear system can be placed arbitrarily through the use of an appropriate observer gain.
such that the observer error is governed by a linear differential equation with an arbitrary characteristic polynomial. Hence the eigenvalues of the error dynamics for an observable linear system can be placed arbitrarily through the use of an appropriate observer gain.
A state feedback controller and linear observer can be combined to form a stabilizing controller for a reachable and observable linear system by using the estimate of the state in the feedback control law. The resulting controller is given by
A discrete time, linear process with noise is given by

where
 is a vector, white, Gaussian random process with mean 0, autocovariance
is a vector, white, Gaussian random process with mean 0, autocovariance  ,
,  is a white, Guassian random process with mean 0, variance
is a white, Guassian random process with mean 0, variance  . We take the initial condition to be random with mean 0 and covariance
. We take the initial condition to be random with mean 0 and covariance  . The optimal estimator is given by
. The optimal estimator is given by

where the observer gain satisfies

This estimator is an example of a Kalman filter.
Frequently Asked Questions
Errata
|
MATLAB codeThe following MATLAB scripts are available for producing figures that appear in this chapter.
See the software page for more information on how to run these scripts. Additional InformationAdditional information about Kalman filtering, including an introduction to stochastic processes in continuous and discrete time, is also available in the Optimization-Based Control supplement: |