Exercise: State feedback control of an AFM in contact mode
From FBSwiki
Consider the model of an AFM in contact mode given in Example 5.9:
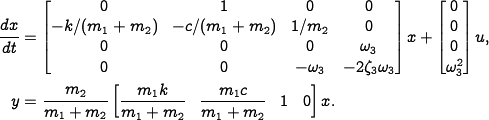
Use the MATLAB script afm_data.m to generate the system matrices.
- Compute the reachability matrix of the system and numerically determine its rank. Scale the model by using milliseconds instead of seconds as time units. Repeat the calculation of the reachability matrix and its rank.
- Find a state feedback controller that gives a closed loop system with complex poles having damping ratio 0.707. Use the scaled model for the computations.
-
Compute state feedback gains using linear quadratic
control. Experiment by using different weights. Compute the gains
for
 ,
,  and
and  and explain the result. Choose
and explain the result. Choose
 and explore what happens to the feedback
gains and closed loop eigenvalues when you change
and explore what happens to the feedback
gains and closed loop eigenvalues when you change  . Use the
scaled system for this computation.
. Use the
scaled system for this computation.