Frequency Domain Design
| Prev: PID Control | Chapter 11 - Frequency Domain Design | Next: Robust Performance |
In this chapter we continue to explore the use of frequency domain techniques for design of feedback systems. We begin with a more thorough description of the performance specifications for controls systems, and then introduce the concept of "loop shaping" as a mechanism for designing controllers in the frequency domain. We also introduce some fundamental limitations to performance for systems with right half plane poles and zeros.
Textbook ContentsFrequency Domain Design (pdf, 28Sep12)
|
Lecture MaterialsSupplemental Information
|
Chapter Summary
This chapter describes the use of the loop shaping to design a control law to achieve a desired level of performance:
Control design in the frequency domain consists of designing a feedback controller
 and a feedforward controller
and a feedforward controller  as illustrated in the basic feedback diagram below:
as illustrated in the basic feedback diagram below:
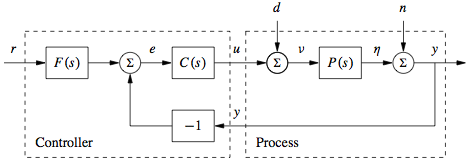
The external signals are the reference signal
 , the load disturbance
, the load disturbance  and the measurement noise
and the measurement noise  . The process output is
. The process output is  , and the control signal is
, and the control signal is  . This control structure is also known as a two degree of freedom controller.
. This control structure is also known as a two degree of freedom controller.
The primary transfer functions that define the input/output characteristics of the system are called the Gang of Six:

The transfer functions in the first column give the response of the process output and control signal to the reference signal. The second column gives the response of the control variable to the load disturbance and the noise, and the final column gives the response of the process output to those two inputs. When
 , the system is said to have pure error feedback and the relevant input/output transfer functions are given by the Gang of Four, given by the transfer functions in the right two columns.
, the system is said to have pure error feedback and the relevant input/output transfer functions are given by the Gang of Four, given by the transfer functions in the right two columns.
Feedforward compensation is used to provided improved response to reference signals and measured disturbances (2 DOF system). The figure below illustrates one possible structure for designing a feedforward compensator:
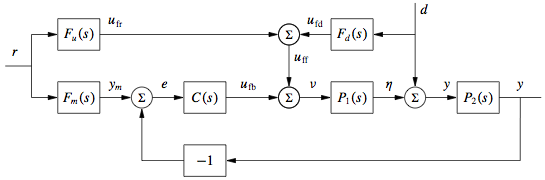
Three feedforward elements are present:
 sets the desired output value,
sets the desired output value,  generates the feedforward command
generates the feedforward command  and
and  attempts to cancel disturbances. The transfer function from reference input to process output is given by
attempts to cancel disturbances. The transfer function from reference input to process output is given by

The first term represents the desired transfer function and the second term should be made small. Perfect feedforward compensation is obtained by choosing
 .
.
The performance of a system can be given in terms of the characteristics of the frequency response between an input and output. A resonant peak is a maximum of the gain, and the peak frequency is the corresponding frequency. The gain crossover frequency is the frequency where the open loop gain is equal one. The bandwidth is defined as the frequency range where the closed loop gain is
 of the low-frequency gain
(low-pass), mid-frequency gain (band-pass) or high-frequency gain (high-pass).
of the low-frequency gain
(low-pass), mid-frequency gain (band-pass) or high-frequency gain (high-pass).
The sensitivity function
 describes how disturbances are attenuated by closing the feedback loop. Disturbances with frequencies such that
describes how disturbances are attenuated by closing the feedback loop. Disturbances with frequencies such that  are attenuated, but disturbances with frequencies such that
are attenuated, but disturbances with frequencies such that  are amplified by feedback. The maximum sensitivity
are amplified by feedback. The maximum sensitivity  , which occurs at the frequency
, which occurs at the frequency  , is a measure of the largest amplification of the disturbances. The complementary sensitivity function
, is a measure of the largest amplification of the disturbances. The complementary sensitivity function  describes how well the controller tracks a references signal. The maximum complementary sensitivity,
describes how well the controller tracks a references signal. The maximum complementary sensitivity,  , which occurs at the frequency
, which occurs at the frequency  , is the peak value of the magnitude of the complementary sensitivity function. It provides the maximum amplification from the reference signal to the output signal.
, is the peak value of the magnitude of the complementary sensitivity function. It provides the maximum amplification from the reference signal to the output signal.
There are approximate relations between specifications in the time and frequency domains. In the frequency domain the response time can be characterized by the closed loop bandwidth
 , the gain crossover frequency
, the gain crossover frequency  and the sensitivity frequency . The product of bandwidth and rise time is approximately constant,
and the sensitivity frequency . The product of bandwidth and rise time is approximately constant,  , so decreasing the rise time corresponds to increasing the closed loop bandwidth. The overshoot of the step response
, so decreasing the rise time corresponds to increasing the closed loop bandwidth. The overshoot of the step response  is related to the resonant peak
is related to the resonant peak  of the frequency response in the sense that a larger peak normally implies a larger overshoot.
of the frequency response in the sense that a larger peak normally implies a larger overshoot.
Using frequency domain specifications, controllers can often be designed by shaping the loop transfer function,
 . The gain curve and sensitivity functions for a typical loop transfer function are shown below:
. The gain curve and sensitivity functions for a typical loop transfer function are shown below:
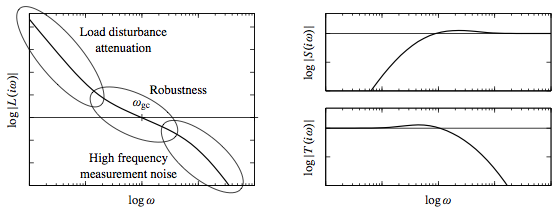
The plot on the left shows the gain curve and the plots on the right show the sensitivity function and complementary sensitivity function. The gain crossover frequency
and the slope  of the gain curve at crossover are important parameters that determine the robustness of closed loop systems. At low frequency, a large magnitude for
of the gain curve at crossover are important parameters that determine the robustness of closed loop systems. At low frequency, a large magnitude for  provides good load disturbance rejection and reference tracking, while at high frequency a small loop gain is used to avoid amplifying measurement noise.
provides good load disturbance rejection and reference tracking, while at high frequency a small loop gain is used to avoid amplifying measurement noise.
A common control element to shape the loop transfer function is to use a pole/zero pair:
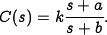
The compensator is called a lead compensator if
 the controller provides phase lead between frequencies
the controller provides phase lead between frequencies  and
and  . The compensator is called a lag compensator
if
. The compensator is called a lag compensator
if  and this form is often used to provide low frequency gain. Lead and lag compensation are closely related to PD and PI controllers.
and this form is often used to provide low frequency gain. Lead and lag compensation are closely related to PD and PI controllers.
Feedback control systems have a number of fundamental limits, usually exacerbated by the presence of right half plane poles and zeros. For systems with right half plane poles or zeros, we can decompose the process dynamics into a minimum phase transfer function (no right half plane poles or zeros) and an all pass transfer function (gain = 1):

The gain crossover inequality

provides a relationship between the phase margin
 , the slope of the gain curve . For processes with near pole/zero cancellations in the right half plane, the gain crossover inequality limits the maximum amount of achievable phase margin.
, the slope of the gain curve . For processes with near pole/zero cancellations in the right half plane, the gain crossover inequality limits the maximum amount of achievable phase margin.
Another fundamental limit is given by Bode's integral formula, which states that for systems with a loop transfer function that goes to zero faster than
 as
as  , the sensitivity function must satisfy
, the sensitivity function must satisfy

where
 are the poles in the right half-plane. This conservation law shows that to get lower sensitivity in one frequency range, we must get higher sensitivity in some other region. An analogous formula exists for the complementary sensitivity function in the presence of right half plane zeros.
are the poles in the right half-plane. This conservation law shows that to get lower sensitivity in one frequency range, we must get higher sensitivity in some other region. An analogous formula exists for the complementary sensitivity function in the presence of right half plane zeros.



Frequently Asked Questions
Errata
|
MATLAB codeThe following MATLAB scripts are available for producing figures that appear in this chapter.
See the software page for more information on how to run these scripts. |