Frequency Domain Analysis
| Prev: Transfer Functions | Chapter 9 - Frequency Domain Analysis | Next: PID Control |
In this chapter we study how how stability and robustness of closed loop systems can be determined by investigating how signals propagate around the feedback loop. The Nyquist stability theorem is a key result that provides a way to analyze stability and introduce measures of degrees of stability.
Textbook ContentsFrequency Domain Analysis (pdf, 28Sep12)
|
Lecture MaterialsSupplemental Information
|
Chapter Summary
This chapter describes the use of the Nyquist criterion for determining the stability of a system:
The loop transfer function of a feedback system represents the transfer function obtained by breaking the feedback loop and computing the resulting transfer function of the open loop system. For a simple feedback system
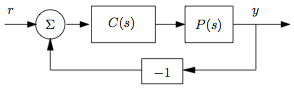
the loop transfer function is given by

The Nyquist criterion provides a way to check the stability of a closed loop system by looking at the properties of the loop transfer function. For a stable open loop system, the Nyquist criterion states that the system is stable if the contour of the loop transfer function plotted from
 to
to  has no net encirclements of the point
has no net encirclements of the point  when it is plotted on the complex plane.
when it is plotted on the complex plane.The general Nyquist criterion uses the image of the loop transfer function applied to the Nyquist countour
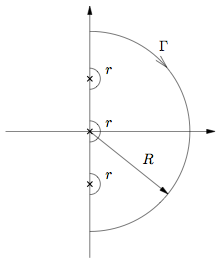 .
.Stability margins describe the robustness of a system to perturbations in the dynamics. We define the phase crossover frequency,
 as the smallest frequency where the phase of the loop transfer function is
as the smallest frequency where the phase of the loop transfer function is  and the gain crossover frequency,
and the gain crossover frequency,  as the small frequency where the loop transfer function has unit magnitude. The gain margin and phase margin are given by
as the small frequency where the loop transfer function has unit magnitude. The gain margin and phase margin are given by

These margins describe the the maximum variation in gain and phase in the loop transfer function under which the system remains stable. Two other margins are the stability margin, which is the shortest distance frmo the Nyquist curve to the critical point
, and the delay margin, which is the smallest time delay required to make the system unstable.
Bode's relations relate the gain and phase of a transfer function with no poles or zeros in the right half plane. They show that

A non-minimum phase sytem is one for which there is more phase lag than the amount given by Bode's relations. Systems with right have plane poles or zeros are non-minimum phase.
The gain of an input/output system is defined as

where sup is the supremum. The small gain theorem states that if two systems with gains
 and
and  are connected in a feedback loop, then the closed loop system is stable if
are connected in a feedback loop, then the closed loop system is stable if  .
.


Frequently Asked Questions
Errata
|
MATLAB codeThe following MATLAB scripts are available for producing figures that appear in this chapter.
See the software page for more information on how to run these scripts. Additional Information |