Week 8: PID Control
 Overview
Overview
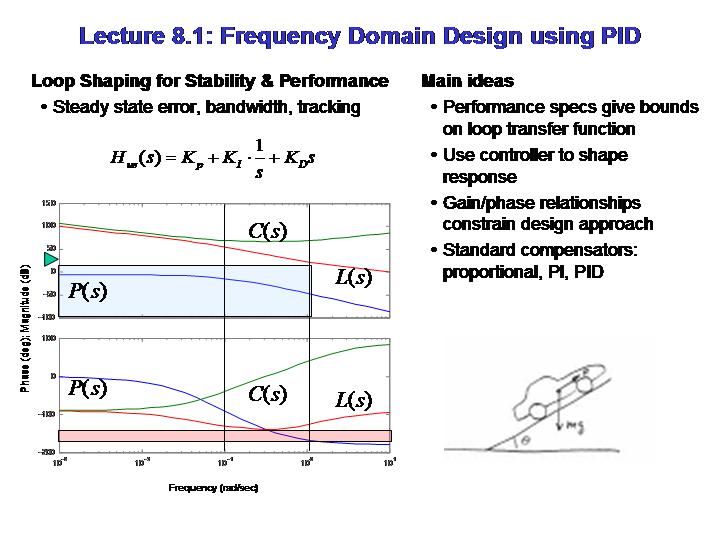
Monday: This lecture covers the basic tools in frequency domain control design using proportional + integral + derivative (PID) control. After reviewing the role of the controller on the loop shape and the relationship between the gain and the phase, we introduce PID control and illustrate its use to design a speed controller that satisfies a given set of performance specifications.
Wednesday: This lecture provides additional tools for PID control design, including Ziegler-Nichols turning and root locus plots for choosing the loop gain. An example system is worked out in detail, using MATLAB.
Friday: Anand Asthigiri will describe feedback mechanisms in biological systems.Handouts
Monday (CDS 101/110)
- Monday lecture handout
- MATLAB handout: L8_1_pid.m
Wednesday (CDS 110 only)
- Wednesday lecture handout
- MATLAB handout: L8_2_cruise.m, L8_2_dfan.m
Reading
-
K. J. Åström and R. M. Murray, Analysis and Design of Feedback Systems, Preprint, 2004. Chapter 8. (Caltech access only).
Homework
This homework set provides practice in specification and design of control systems in the frequency domain using PID control. The first two problems work through examples similar to the ones used in lecture. The third problem, for CDS 110 students, explores the use of PID control to give a desired level of performance for a simplified balance system.
- HW #7
- Useful MATLAB commands
- sisotool - display standard linear system plots on a single screen
- feedback - generate a closed loop system from a loop transfer function
Additional Information