 |
Lecture 4.1: Linear Systems
21 October 2002
|
 |
 This
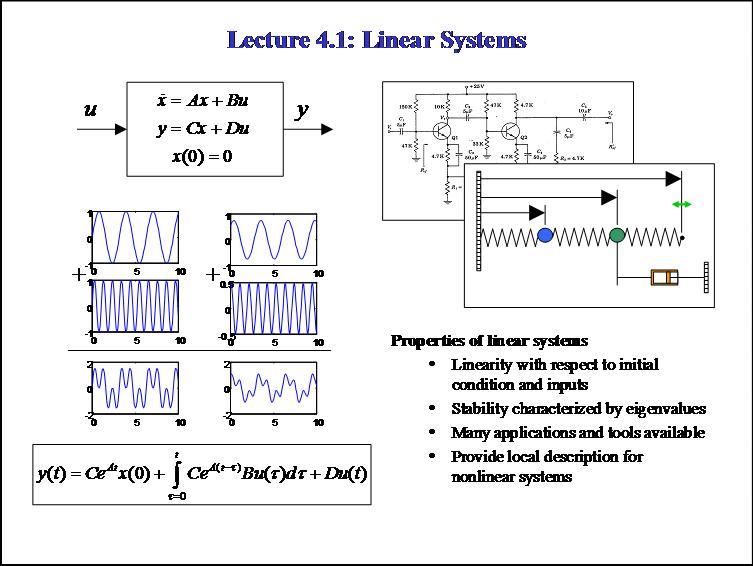
lecture gives an introduction to linear control systems. The main properties
of linear systems are given and the matrix exponential is used to provide a
formula for the output response given an initial condition and input signal.
Linearization of nonlinear systems as an approximation of the dynamics is also
covered.
This
lecture gives an introduction to linear control systems. The main properties
of linear systems are given and the matrix exponential is used to provide a
formula for the output response given an initial condition and input signal.
Linearization of nonlinear systems as an approximation of the dynamics is also
covered.
Mud card responses [advanced
search]:
#!/usr/bin/perl
# -*- perl -*-
#
# htdbsearch.cgi - search for matching files in a database directory
# RMM, 16 Mar 97
#
# This CGI script searches the description files in a directory for a
# against a set of criteria
#
# This script should be called as
#
# http://machine/path/htdblist.cgi?
# or
# http://machine/path/htdblist.cgi?db=&args
#
# where is the name of the configuration file that defines
# all of the information needed to generate the listing. The optional
# arguments are:
#
# _count=NN only list the first NN entries
# _tight=1 use tight listing
# _ssi=1 don't print header, trailer info (for includs)
#
# Include the necessary libraries
require "cgi-lib.pl";
require "htdblib.pl";
# Parse script arguments
if (&htdbinit) {
# If the form contains some values, use them to search, and return
# the results.
if ($in{'_dbconfig'}) {
# Generate the context header for the browser
print &PrintHeader;
# Print out the introductory information for search
if (defined &SearchHeader) {&{$SearchHeader}($DBName);}
# Summarize the search that was performed
$rsltheader =
defined &ResultHeader ? \&ResultHeader : htdb::ResultHeader;
&{$rsltheader}(%in) if (!$in{_ssi});
# Go through and look for matching files
if (not &PrintMatches) { &PrintNoMatches if (!in{ssi}); }
# Generate the trailer
if (defined &dbtrailer) {$dbtrailer = \&DBTrailer};
if (not $dbtrailer) {$dbtrailer = \&htdb::DBTrailer;}
&{$dbtrailer}($DBName) if (!in{ssi});
} else {
# Check to see if there is a user function for printing the search form
if (defined &SearchForm) {$searchform = \&SearchForm};
if (not $searchform) {$searchform = \&htdb::SearchForm;}
# Print out the introductory information for search
if (defined &SearchHeader) {&{$SearchHeader}($DBName);}
# Print the search form
&{$searchform}(%in);
}
}
#
# Subroutine for printing the matches that occured
#
sub PrintMatches {
my ($num_found);
# Go to the database directory and read the contents
chdir $DBPath || die "Can't cd to $DBPath";
opendir(DIR, '.') || die "Can't open $DBPath";
@filenames = readdir(DIR);
closedir(DIR);
# Check to see if there is a user function for checking matches
if (defined &CheckEntry) {$checkentry = \&CheckEntry};
if (not $checkentry) {$checkentry = \&htdb::CheckEntry;}
# Check to see if there is a user function for parsing filenames
if (defined &ParseFname) {$parsefname = \&ParseFname};
if (not $parsefname) {$parsefname = \&htdb::ParseFname;}
# Check to see if there is a user function for printing the entry
if (defined &PrintEntry) {$printentry = \&PrintEntry};
if (not $printentry) {$printentry = \&htdb::PrintEntry;}
# Check to see if there is a user function for printing the entry
if (defined &TightEntry) {$tightentry = \&TightEntry};
if (not $tightentry) {$tightentry = \&htdb::TightEntry;}
# Open the list environment used for the results
# Print the command to generate a list of elements
print ($in{_tight} ? "\n" : "\n");
# Loop through the filenames in order.
$getfnames = defined &GetFnames ? \&GetFnames : htdb::GetFnames;
@filenames = &{$getfnames}($DBPath);
for (@filenames) {
# Parse the filname and extract the ID and tag information
($id, $tag) = &{$parsefname}($filename = $_);
next if not $id;
# Open the file and extract the contents
$contents = &htdb::readfile($filename);
next if not $contents;
# Now see if this entry matches the criteria for a match
next if not &{$checkentry}($contents, %in);
# Print out the information associated with this entry
$count += &{($in{_tight} ? $tightentry : $printentry)}
($filename, $contents, $id, $tag, $DBURL."/".$filename);
$num_found++;
# See if we are counting and stop if needed
last if ($in{_count} && $count > $in{_count});
}
# Close the list environment used for the results
print ($in{_tight} ? "
\n" : "\n");
return $num_found;
}
#
# Subroutine for alerting the user that no matches occured
#
sub PrintNoMatches {
print "No matches found
\n";
print "Sorry, no entries match your request. ";
print "Please choose some different parameters and try again.\n";
print $footer;
}
Handouts from lecture
The following materials were handed out in lecture. These have been updated to
include any corrections.
Required reading
Supplemental reading
This homework set covers linear control systems. The first problem asks for
stability, step and frequency response for some common examples of linear systems.
The second problem considers stabilization of an inverted pendulum on a cart,
using the local linaerization. The remaining problems (for CDS 110 students)
include derivation of discrete time linear systems response functions and derivation
of the linearized model for the Caltech ducted fan.
Modifications to the homework (link above is always the latest version):
- 26 Oct 02: version 1.1 release
- Fixed small typo in problem 1a (see FAQ below)
- 21 Oct 02: problem set release
Frequently asked questions on homework and TA hints:
#!/usr/bin/perl
# -*- perl -*-
#
# htdbsearch.cgi - search for matching files in a database directory
# RMM, 16 Mar 97
#
# This CGI script searches the description files in a directory for a
# against a set of criteria
#
# This script should be called as
#
# http://machine/path/htdblist.cgi?
# or
# http://machine/path/htdblist.cgi?db=&args
#
# where is the name of the configuration file that defines
# all of the information needed to generate the listing. The optional
# arguments are:
#
# _count=NN only list the first NN entries
# _tight=1 use tight listing
# _ssi=1 don't print header, trailer info (for includs)
#
# Include the necessary libraries
require "cgi-lib.pl";
require "htdblib.pl";
# Parse script arguments
if (&htdbinit) {
# If the form contains some values, use them to search, and return
# the results.
if ($in{'_dbconfig'}) {
# Generate the context header for the browser
print &PrintHeader;
# Print out the introductory information for search
if (defined &SearchHeader) {&{$SearchHeader}($DBName);}
# Summarize the search that was performed
$rsltheader =
defined &ResultHeader ? \&ResultHeader : htdb::ResultHeader;
&{$rsltheader}(%in) if (!$in{_ssi});
# Go through and look for matching files
if (not &PrintMatches) { &PrintNoMatches if (!in{ssi}); }
# Generate the trailer
if (defined &dbtrailer) {$dbtrailer = \&DBTrailer};
if (not $dbtrailer) {$dbtrailer = \&htdb::DBTrailer;}
&{$dbtrailer}($DBName) if (!in{ssi});
} else {
# Check to see if there is a user function for printing the search form
if (defined &SearchForm) {$searchform = \&SearchForm};
if (not $searchform) {$searchform = \&htdb::SearchForm;}
# Print out the introductory information for search
if (defined &SearchHeader) {&{$SearchHeader}($DBName);}
# Print the search form
&{$searchform}(%in);
}
}
#
# Subroutine for printing the matches that occured
#
sub PrintMatches {
my ($num_found);
# Go to the database directory and read the contents
chdir $DBPath || die "Can't cd to $DBPath";
opendir(DIR, '.') || die "Can't open $DBPath";
@filenames = readdir(DIR);
closedir(DIR);
# Check to see if there is a user function for checking matches
if (defined &CheckEntry) {$checkentry = \&CheckEntry};
if (not $checkentry) {$checkentry = \&htdb::CheckEntry;}
# Check to see if there is a user function for parsing filenames
if (defined &ParseFname) {$parsefname = \&ParseFname};
if (not $parsefname) {$parsefname = \&htdb::ParseFname;}
# Check to see if there is a user function for printing the entry
if (defined &PrintEntry) {$printentry = \&PrintEntry};
if (not $printentry) {$printentry = \&htdb::PrintEntry;}
# Check to see if there is a user function for printing the entry
if (defined &TightEntry) {$tightentry = \&TightEntry};
if (not $tightentry) {$tightentry = \&htdb::TightEntry;}
# Open the list environment used for the results
# Print the command to generate a list of elements
print ($in{_tight} ? "\n" : "\n");
# Loop through the filenames in order.
$getfnames = defined &GetFnames ? \&GetFnames : htdb::GetFnames;
@filenames = &{$getfnames}($DBPath);
for (@filenames) {
# Parse the filname and extract the ID and tag information
($id, $tag) = &{$parsefname}($filename = $_);
next if not $id;
# Open the file and extract the contents
$contents = &htdb::readfile($filename);
next if not $contents;
# Now see if this entry matches the criteria for a match
next if not &{$checkentry}($contents, %in);
# Print out the information associated with this entry
$count += &{($in{_tight} ? $tightentry : $printentry)}
($filename, $contents, $id, $tag, $DBURL."/".$filename);
$num_found++;
# See if we are counting and stop if needed
last if ($in{_count} && $count > $in{_count});
}
# Close the list environment used for the results
print ($in{_tight} ? "
\n" : "\n");
return $num_found;
}
#
# Subroutine for alerting the user that no matches occured
#
sub PrintNoMatches {
print "No matches found
\n";
print "Sorry, no entries match your request. ";
print "Please choose some different parameters and try again.\n";
print $footer;
}