

HOME
|

|
courses
grad students
postdocs
visitors
lectures
|
|
books
papers
software
|
|
CIMMS
talks
|
|
announcements
assistant
travel/visitor
incoming forms
macs
|
Professor Jerrold E. Marsden
Demos
Collision Avoidance
(1)
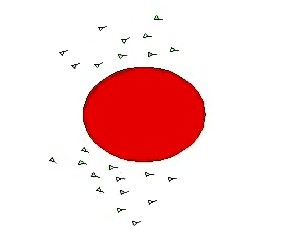
Swarm of 25 vehicles performing a "split-rejoin" maneuver in 2D environment. Vehicles are chasing an agent (not shown) which moves towards the right and avoid collision with each other and with external obstacles using steering (gyroscopic) and braking (dissipation) forces. Each agent is acting autonomously and there is no prescribed motion for the group per se, therefore the "formation structure" which is seen to form is due to emergent behavior from localized control. (See paper listed below for more details.)Contact Shawn Shadden for more information.
Shawn Shadden (2)

Similar to the movie above, except demonstrated in a 3D environment.Contact Shawn Shadden for more information.
Shawn Shadden (3)
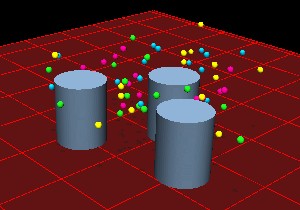
Top View | Side View | Particle View | VRML Four swarms of different colored vehicles pass through each other at an "intersection" where some buildings are in the way. The spheres denote a vehicle's safety shell. Collisions occur if the safety shell touches an obstacle, another vehicle, or the ground. In the simulation, there are no collisions, despite the crowded conditions, and each of the 64 vehicles gets to its intended destination.
Contact Shane Ross for more information.
Shane Ross
| top |
All Demos
| Spacecraft Orbits | Vortex Dynamics | Rigid Bodies | Interesting Links |

|
|
|