
Week 3: Stability and Performance
 Overview
Overview
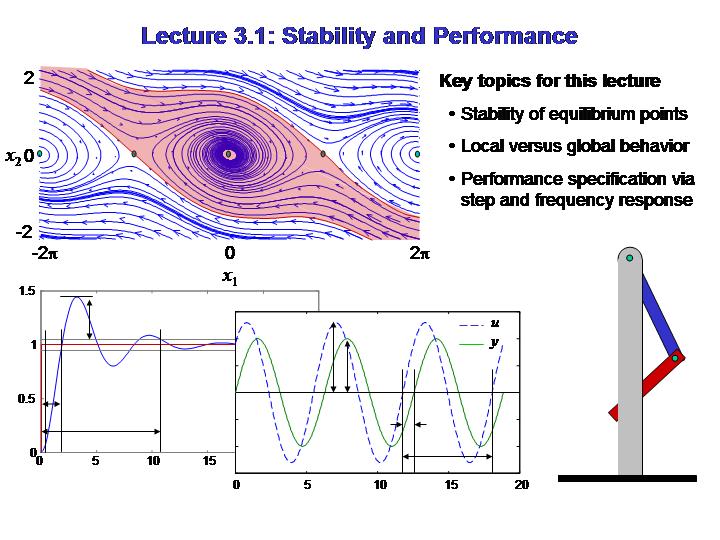
This lecture provides an introduction to stability and performance of (nonlinear) control systems. Formal definitions of stability are given and phase portraits are introduced to help visualize the concepts. Local and global behavior of nonlinear systems is discussed, using a damped pendulum and the predator-prey problem as examples. Performance of control systems is presented for transient and steady state specifications.
Reading Material and Handouts
Handouts from lecture
- Monday lecture handout
- MATLAB files: L3_1_stability.m, phaseplot.m, boxgrid.m, oscillator.m, pendulum.m, saddle.m, predprey.m
- Homework #3
Required reading
-
K. J. Åström and R. M. Murray, Analysis and Design of Feedback Systems, Preprint, 2003. Chapter 3. (Caltech access only).
- CDS 110: K. J. Åström, Control Systems Design, Preprint, 2002. Sections 7.6. (Caltech access only)
Supplemental reading
- K. J. Åström, Control Systems Design, Preprint, 2002. Sections 3.5 and 7.4. (Caltech access only)
Homework Set #3
This homework set covers stability and performance through a series of application examples. The first problem provides a set of three real-world models in which the student must identify the equilibrium points and determine stability of the equilibrium points (through simulation). The second problem explores performance specification in the conext of the cruise control example, including step response and frequency response.
- Homework Assignment
- MATLAB functions: phaseplot.m, boxgrid.m
- SIMULINK models: hw1cruise.mdl, hw3cruise_sat.mdl