
CDS 101: Principles of Feedback and Control
Lecture 5.1: Controllability and State Space Feedback
28 October 2002

|
CDS 101: Principles of Feedback and ControlLecture 5.1: Controllability and State Space Feedback28 October 2002 |
|
| Lecture | Reading | FAQ | Homework | CDS 101 |
 This
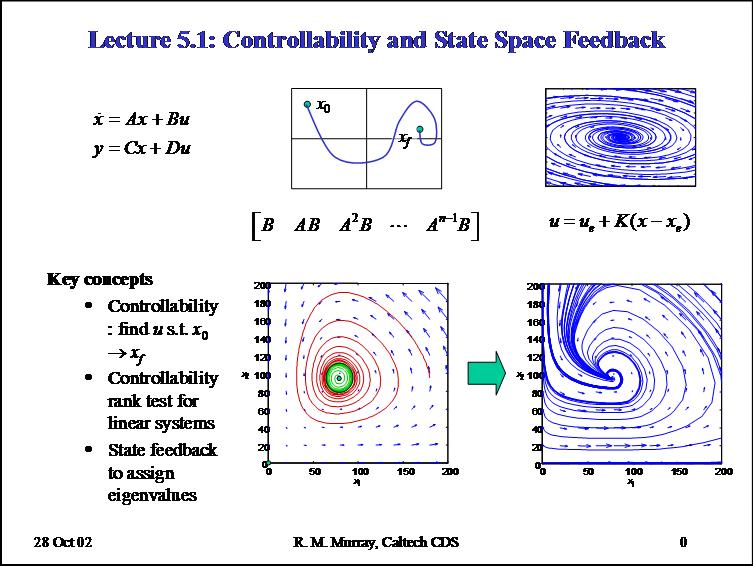
lecture introduces the concept of controllability and explores the use of state
space feedback for control of linear systems. Controllability is defined as
the ability to move the system from one condition to another over finite time.
The controllability matrix test is given to check if a linear system is controllable,
and the test is applied to several examples. The concept of (linear) state space
feedback is introduced and the ability to place eigenvalues of the closed loop
system arbitrarily is related to controllability. A cart and pendulum system
and the preditor prey problem are used as examples.
This
lecture introduces the concept of controllability and explores the use of state
space feedback for control of linear systems. Controllability is defined as
the ability to move the system from one condition to another over finite time.
The controllability matrix test is given to check if a linear system is controllable,
and the test is applied to several examples. The concept of (linear) state space
feedback is introduced and the ability to place eigenvalues of the closed loop
system arbitrarily is related to controllability. A cart and pendulum system
and the preditor prey problem are used as examples.
Mud card responses [advanced search]:
#!/usr/bin/perl
# -*- perl -*-
#
# htdbsearch.cgi - search for matching files in a database directory
# RMM, 16 Mar 97
#
# This CGI script searches the description files in a directory for a
# against a set of criteria
#
# This script should be called as
#
# http://machine/path/htdblist.cgi? \n";
print $footer;
}
Packard, Poola and Horowitz, Dynamic
Systems and Feedback, Section 25 There is no homework set this week, due to the
midterm exam.\n" : "
\n" : "\n");
return $num_found;
}
#
# Subroutine for alerting the user that no matches occured
#
sub PrintNoMatches {
print "\n");
# Loop through the filenames in order.
$getfnames = defined &GetFnames ? \&GetFnames : htdb::GetFnames;
@filenames = &{$getfnames}($DBPath);
for (@filenames) {
# Parse the filname and extract the ID and tag information
($id, $tag) = &{$parsefname}($filename = $_);
next if not $id;
# Open the file and extract the contents
$contents = &htdb::readfile($filename);
next if not $contents;
# Now see if this entry matches the criteria for a match
next if not &{$checkentry}($contents, %in);
# Print out the information associated with this entry
$count += &{($in{_tight} ? $tightentry : $printentry)}
($filename, $contents, $id, $tag, $DBURL."/".$filename);
$num_found++;
# See if we are counting and stop if needed
last if ($in{_count} && $count > $in{_count});
}
# Close the list environment used for the results
print ($in{_tight} ? "
No matches found
\n";
print "Sorry, no entries match your request. ";
print "Please choose some different parameters and try again.Reading Material and Handouts
Handouts from lecture
The following materials were handed out in lecture. These have been updated to
include any corrections.
Required reading
Supplemental reading
No Homework