
Week 1: Introduction to Feedback and Control
 Overview
Overview
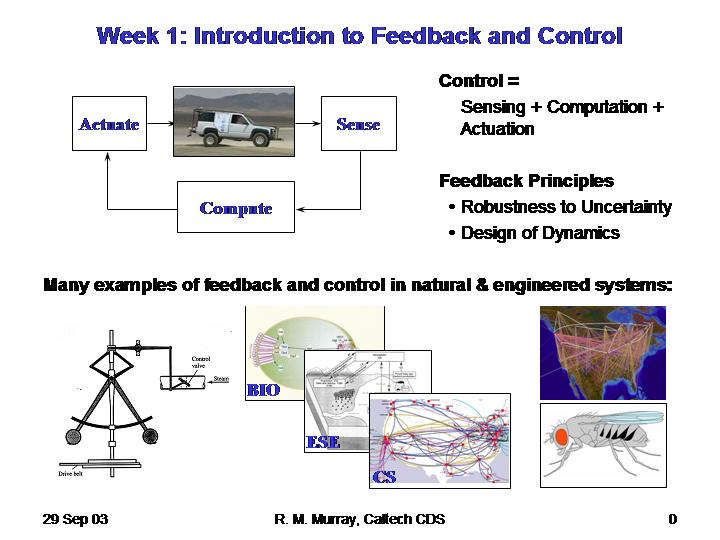
The goal of this lecture is to introduce some of the basic ideas in feedback systems and provide examples that will allow students to identify and recognize control systems in their everyday world. Two major principles of control--robustness through feedback and design of dynamics--are emphasized throughout the lecture. CDS 101/110 course administration is also covered.
Reading Material and Handouts
Handouts from lecture
Required reading
-
K. J. Åström and R. M. Murray, Analysis and Design of Feedback Systems, Preprint, 2003. Chapter 1. (Caltech access only).
-
For Spy in the Sky, New Eyes, NY Times, June 2001.
Supplemental reading
-
R. M. Murray (editor), Control in an Information Rich World: Report of the Panel on Future Directions in Control, Dynamics and Systems, SIAM, 2003. Chapter 2.
-
K. J. Åström, Control Systems Design, Preprint, 2002. Chapter 1. (Caltech access only)
-
CDS 110: T. M. Apostol, Calculus, Volume II, John Wiley and Sons,1969. Chapters 1-7.
- CDS 110: A. D. Lewis, A Mathematical Approach to Classical Control, 2003. Appendices A and B. Online access.
Homework Set #1
This homework set is designed to provide some examples and intuition about feedback and control systems. The first problem problem is a conceptual problem designed to provide examples of feedback and control systems in the everyday world. The second problem involves using MATLAB to explore the performance of a engineering feedback system by manually tuning gains and evaluating the resulting performance. The advanced problems (CDS 110 only) further explore these concepts through articles in the popular press about control systems and additional MATLAB/SIMULINK examples.
- HW #1
- SIMULINK cruise control module (for problem #2): hw1cruise.mdl, documentation
- SIMULINK ball and beam module (for problem #5): hw1ballbeam.mdl, documentation
Modifications to the homework (link above is always the latest version):
- 1 Oct 03: the original ball and beam model had the wrong values as
the defaults. The correct values should be 800 for the coefficient on
the (alpha) feedback term and 350 for the coefficient on the (alpha)dot
feedback term. The file hw1ballbeam.mdl has been modified to reflect
that change.