

|
Hovercraft Formation | |
|
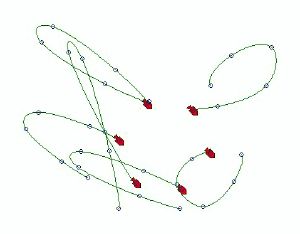
This animation shows a fleet of six hovercraft that are to get into a hexagonal formation from a given starting configuration. The hovercraft are underactuated, with a forward thrust and steering control, but each hovercraft has three degrees of freedom. DMOC calculates the optimal trajectory, minimizing the overall control effort. | |
 |
For more information, please see:
- Junge, O., J. E. Marsden, and S. Ober-Blöbaum [2005], Discrete mechanics and optimal control, Proc. IFAC Conf, Prague, June 2005.
- Junge, O., and S. Ober-Blöbaum [2005], Optimal Reconfiguration of Formation Flying Satellites, IEEE Conference on Decision and Control and European Control Conference ECC 2005, Seville, Spain.
To DMOC People
To DMOC Projects
Back to the Projects Page



 |
 |
©2003-2007 Jerrold E. Marsden. All Rights Reserved.