Clarification: Note that frequency domain methods can be used for MIMO systems. The lecture notes state that they are mainly useful for SISO systems (i.e., for MIMO systems, state space methods are more useful).
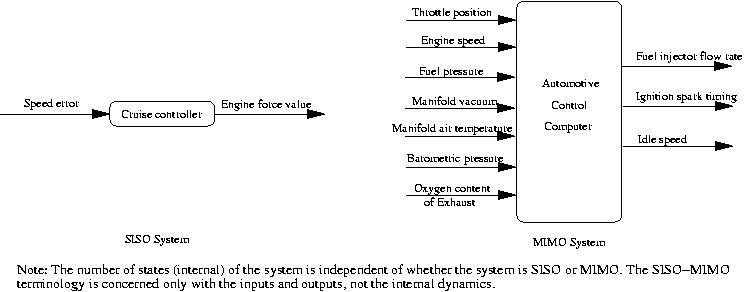
Short answer: State space methods generalize more easily (in terms of whether they work, and (ii) if they work, how much more effort is required to go) from SISO to MIMO. See figure for an example of SISO and MIMO systems.
Long answer:
Frequency domain methods
Frequency domain tools are mainly used for SISO systems.
Frequency response methods are useful because they provide insights into the
benefits and trade-offs of feedback control. Also, the ease with which
experimental information can be used for design purposes is an advantage.
Raw measurements of the output amplitude and phase of a plant
undergoing a sinusoidal input excitation are sufficient to design a suitable
feedback control (no intermediate processing is required such as finding
poles and zeros or determining system matrices). The power of current day
computers has however rendered this advantage less important.
State space methods
State space methods are advantageous for several reasons. They allow us to
study more general models (i.e., not just linear or stationary ODEs).
Having the ODEs in state variable form gives us a compact, standard form for
study. They permit us to use the ideas from geometry in visualizing the
solutions of ODEs as paths in a state space. Finally, by definition, they
contain a description of the internal states of the system along with
the input-output relationship. This helps us keep track of all the modes (those explicitly
displayed by the transfer function and the hidden ones) and it is important to do
this because a system that is input-output stable can be internally unstable
(leading to saturation or burn out; see [3] for example). Although it is
possible to do this by careful bookkeeping with the transfer function
(~freq domain) calculations, it is more easily evident in state space
representations.
SISO -> MIMO
The most important difference between SISO and MIMO systems is the presence of
directions in the latter. Directions are relevant for vectors and
matrices, but not for scalars. Matrices come into the picture in the state
space representation (SISO and MIMO systems), and in the transfer function
representation for MIMO systems (y(s)=G(s)u(s), where y is an lx1 vector,
u is an mx1 vector and G(s) is an lxm transfer function matrix). Despite the
complicating factor of directions, most of the ideas and techniques for SISO
systems can be extended to MIMO systems, through the use of what is called
singular value decomposition (SVD), which provides a useful way of
quantifying multivariable directionality. An important exception is
Bode's stability criterion (a frequency domain method) which has no
generalization in terms of singular values and hence cannot be used in
MIMO control design. It turns out that a generalization is not possible because
it is difficult to find a good measure of phase (an important frequency
domain variable) for MIMO transfer functions. Loopshaping is another frequency
domain technique which works well for relatively simple problems, but when
applied to complicated (especially MIMO) systems, requires considerably
greater effort on the part of the control engineer to achieve stability. Whereas, we have already mentioned that state space systems allow
us to look at complicated systems. The effort in going from SISO to MIMO
in state space design is not significant.
Thus state space techniques generalize well (in terms of (i) whether they work and (ii) if they work, how much more effort is required when going from SISO to MIMO). This, the intrinsic advantages of state space representation (described above), and the computational power of today's computers are the reasons why they are preferred to frequency domain methods for MIMO systems.
References:
[1] Franklin, G. F., Powell, J. D., and Emami-Naeini, A., 1994. Feedback control
of dynamic system, Ch.6 and p. 469--471, Addison-Wesley.
[2] Skogestad, S., Postlethwaite, I., 1996. Multivariable feedback control,
Ch.2 and p. 63, John Wiley and Sons.
[3] Kailath, T., 1980. Linear Systems, p.31--34, Prentice Hall.