|
|
FAQ (Frequently Asked Questions)
Category:
CDS 101/110 Fall 2004
Identifiers: H0 H1 H2 H3 H4 H5 H6 H7 H8 L0.0 L1.1 L1.2 L2.1 L2.2 L2.3 L3.1 L3.2 L4.1 L4.2 L5.1 L5.2 L6.1 L7.1 L9.1
-
If the reachability matrix is not full rank, isn't it possible for the system to be able to reach many X's, just not all of them?
Submitted by: jianghao
Submitted on: October 25, 2004
Identifier:
L5.1
Yes, that is absolutely possible. Actually, the rank of the reachability matrix can determine what is the dimension of states that can be reached by some input. Then the next step is that you can even find what the set of reachable states is:)
[Back to Top]
-
What do you mean by g(M+m) ~= 1 on slide 7? The units don't work out!
Submitted by: asa
Submitted on: October 25, 2004
Identifier:
L5.1
The culprit turns out to be that the reachability matrix on the slides isn't correct. The correct matrix is
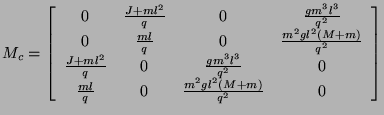 . .
Using this matrix, the condition for the system to be reachable is that
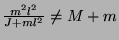 . .
Here the units work out.
[Back to Top]
-
How do you choose the eigenvalues when using "place" in MATLAB?
Submitted by: waydo
Submitted on: October 25, 2004
Identifier:
L5.1
Good question! As we will see later in the quarter, the location of the eigenvalues affects things like rise time, overshoot, settling time, etc. When we do control design we often start with specifications on these properties such as "rise time less than 10 seconds" or "overshoot less than 5 percent". These specifications then guide our choice of eigenvalue locations. In principle, if we have a reachable linear system we can place the eigenvalues wherever we like using feedback. In reality our choices will be limited by nonlinear effects like saturation and stiction, which is why we generally design our controllers based on a linearization but then simulate the full nonlinear system for verification.
If you continue on to CDS110b, you will learn alternate methods for controller design that place the eigenvalues to optimize the behavior of the system relative to some performance metric.
[Back to Top]
-
In lecture you said we want to place the eigenvalues of (A+BK), but MATLAB's "place" places eigenvalues of A-BK. What's the deal?
Submitted by: waydo
Submitted on: October 27, 2004
Identifier:
L5.1
, L5.2
Whether our closed loop dynamics matrix is A-BK or A+BK just depends on the sign convention we use when applying the feedback. Sometimes you will see the signal inverted as it is fed back (so u = -Kx), in which case the closed loop dynamics are given by A-BK, and sometimes it will not be inverted (so u = Kx), in which case we use A+BK. The two formulations are exactly equivalent, and the sign convention just determines the sign of the elements of K.
In the book and in MATLAB we use the A-BK sign convention, so we will be more careful to do this in lecture in the future.
[Back to Top]
-
What do you mean by "If the integral is surjective (as a linear operator), then we can find an input to achieve any desired state"?
Submitted by: asa
Submitted on: December 6, 2004
Identifier:
L5.1
Surjective is what is commonly known as "onto". That is, if we have an operator f: X -> Y, then the image of f is all of Y. In this context, we have a linear operator (the operator, with integral, etc., that takes a system state plus input at time 0 to the system state at time T). This is an operator from the space of (initial conditions (cross) inputs u(tau)) to the space of (final system states). We really want to consider just the input term (the integral), which is an operator from the inputs u(tau) to system states. If this operator is surjective, that means we can reach any final state (accounting for the given initial condition), as long as we have complete control over the input.
[Back to Top]
|